
Если ваш коптер при пробных взлетах крутит или наклоняет куда-нибудь, и вы никак не можете заставить ваш коптер летать, возможно вам поможет процедура выравнивания триммерами. Она называется Save Trim.
Перекосы при управлении коптером могут возникнуть по разным причинам. Это и неправильная установка контроллера, и неправильная калибровка гироскопа/акселерометра, и нарушения геометрии рамы (лучи разной длины, установлены под разными углами), и несоосность моторов, и разнотяг моторов по тем или иным причинам.
Но если вы уже исчерпали все возможные догадки, а эта «шайтан-машина» никак не хочет лететь ровно — возможно вам поможет эта статья.
Для начала немного отвлечемся от коптеров.
Если вы уже занимались моделизмом, и строили самолеты, либо уже имели опыт управления простейшими китайскими дешевыми квадриками — вы уже знаете, что такое триммеры. Это такие микрики, которыми можно настроить крен (компенсацию крена) в ту или иную сторону, и пощелкав триммерами добивались ровного полета.
Но данный способ нам слегка не подходит. У нас на борту — умный полетный контроллер, который должен сам знать, где находится горизонт, как выровнять коптер — чтобы он никуда не дрейфовал. Правильно построенный и правильно настроенный коптер должен оставаться на месте сам.
То есть, если:
- полет выполняется в режиме Stabilize
- в безветренную погоду (или в большом помещении)
- выставлен газ висения и коптер завис на какой-то высоте
- пульт больше руками не трогаем, никакие стики не отклоняем
- коптер НИКУДА НЕ ДРЕЙФУЕТ и НЕ КРУТИТСЯ
— значит у нас всё настроено правильно.
Первое желание этого достичь — просто пощелкать триммерами, и летать так. Но это неправильно, потому что тем самым мы задаем постоянное смещение по каналам радиоуправления от середины. И если мы откалибруем радио (или если у нас потеряется связь в полете) — у нас коптер опять станет летать криво.
Процедура делается следующим образом (ВАЖНО — погода должна быть БЕЗВЕТРЕННОЙ):
1. Сначала калибруем правильно акселерометр/гироскоп.
2. Следующим делом — надо настроить наш пульт, чтобы один из тумблеров (достаточно двухпозиционного) — был сопоставлен с каналом номер 7. Как это делать — ищем в документации именно по вашему пульту.
3. Далее калибруем радио. При этом у нас диапазон получается примерно от 1000 до 2000, с серединой 1500 мс. Реально — конечно будут другие цифры, это зависит от вашего радиотракта, от настроек пульта. Но это неважно. Главное — на момент калибровки радио — триммеры на пульте должны стоять на нейтральных положениях. МишнПланер (далее — МП) при калибровке радио сам запомнит ваши фактические минимальные, максимальные значения и нейтральную позицию стиков (и по каналам тумблеров). По каналу номер семь разработчики советуют убедиться, что максимальная позиция больше 1800 мс. Смотрим картинку:

4. Еще надо задать в МП реакцию полетного контроллера на щелчок тумблера:
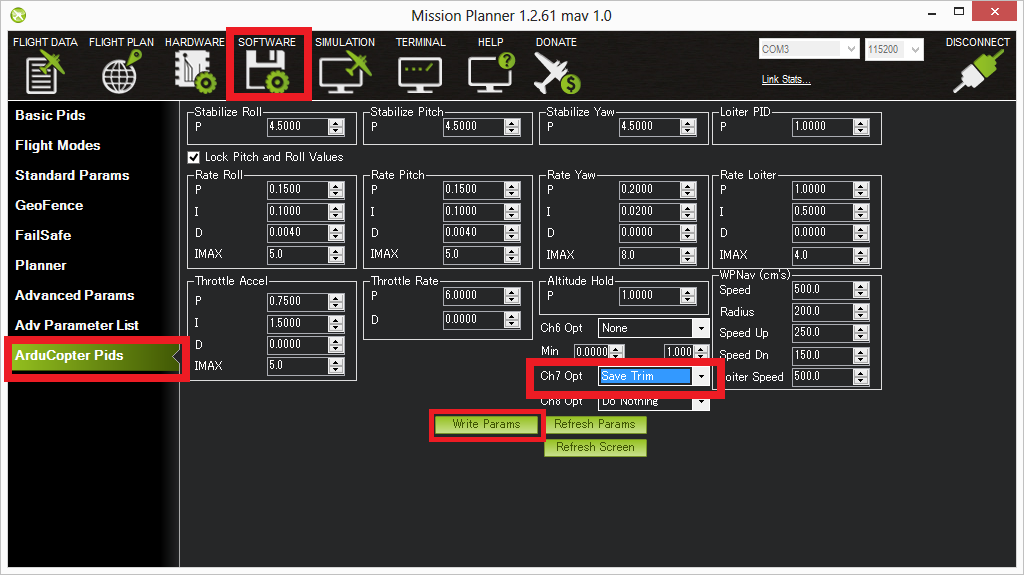
При этом мы определяем, что когда тумблер включен — то надо сохранить текущие тримы как отклонение.
5. Когда тумблер канала номер 7 выключен — взлетаем в режиме Stabilize. Можно это делать следующим образом — армимся, раскручиваем двигатели до того состояния когда коптер почти взлетит. При этом скорее всего коптер куда-то «поползет» или станет «вращаться». Газ не добавляем дальше, щелкаем триммерами чтобы блокировать сползание/раскрутку. Если никуда не «ползет» — добавляем газа дальше. Если ещё пополз — опять щелкаем триммерами. И так вплоть до отрыва коптера от поверхности. Далее — вывешиваем коптер на высоте более метра (чтобы избежать турбулентности от земли), и окончательно добиваемся неподвижности коптера в горизонтальной плоскости.
6. Сажаем коптер, переводим газ в ноль, дизарм.
7. Отпускаем стики ролла/питча/руддера, и включаем тумблер канала номер 7 как минимум на 1 секунду.
8. Возвращаем все триммеры в нейтральные позиции.
9. Взлетаем, оцениваем качество регулировки. Если качество не устроило — то повторяем пункты с 5 по 9 несколько раз, пока не достигнем требуемого результата.
При этом у нас вычисляются коэффициенты поправки AHRS_TRIM_*. Они будут действительны конкретно для вашего коптера конкретно в этой сборке. Если вы поменяете например угол наклона контроллера (добавили виброизоляцию) или поменяли моторы/регуляторы/пропеллеры (изменили тягу), либо поменяли лучи (изменили геометрию) — эти коэффициенты должны быть другими, то есть калибровку нужно повторить.
Если ничего не понятно из словесного описания — смотрим официальное видео. Процедура Save Trim показана с начала и до 3:20 на видео:
А вот на этом видео показано, как настроили на аппаратуре канал номер 5, но в контроллер его всё равно подключили в канал номер 7 (при CPPM подключении этот способ не сработает).
Если вам не помогла эта статья, и вы по каким-то причинам ничего сделать не можете, возможно вам поможет процедура Auto Trim (автотрим). Её результаты будут аналогичными, только проводится она без участия триммеров на пульте. Почитать про неё можно тут (Автоматическая калибровка акселерометра (Auto Trim)). На первом видео процедура автотрима показана после 3:20.
Всегда ваш, Ганиев Тимур — 5yoda5.
5yoda5 # apmcopter
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Здравствуйте.
Помогите пожалуйста решить проблему.
Собрал коптер клон F450 на APM 2,6. Первые два полёта прошли нормально. В стабилайз точку не держал, немного плавал, ветерок был. Но затем просто перестал взлетать — заваливается. Причём обычно назад, но бываети набок.
Всё по кругу перекалибровал. Выставил подавление вибраций 20. Результат тот же и в безветренную погоду. Корректировка стиками на помогает. В МР по крену 1 градус отклонения, но первые полёты отлетал так же, с теми же вибрациями. Скорректировать удачно стиками не получается, всё равно валится, не в одну, так в другую сторону.
Подскажите, пожалуйста, что может быть.
Дам один хинт, возможно решит вашу проблему.
Как только включили питание на коптере — секунд 10-15 коптер не трясем! Идет калибровка акселей (выполняется каждый раз при включении).
Если понаблюдать за светодиодиками на плате, становится понятен момент, когда инициализация закончена.
То есть поставили коптер, подключили акк, 15 секунд не трогаем коптер, потом можно его куда удобнее переставлять и армить. Возможно вы его трясете, при этом что-то доделываете перед полетом.
Спасибо, попробую как погода позволит.
Уточню: стоять должен на абсолютно ровной (горизонтальной) поверхности?
Не обязательно — главное, не трясти.
Я проводил эксперимент — специально тряс контроллер в момент включения — потом в МП видел прикольные вещи! Горизонт плавал или даже переворачивался при неподвижном контроллере…
Понял, Тимур. Не трясти-)
Перед армингом, должен стоять строго горизонтально? Если местность не очень ровная и есть наклон в несколько градусов, это критично?
Так сколько — «несколько градусов»? Как взлетать собираетесь с наклонной поверхности?
Я могу ошибиться, если наклон более 30 градусов, то армиться не будет. Настраивается параметром в полном списке параметров.
Приблизительно ровно выставляю (на глазок) — и полетел! В момент отрыва коптер иногда совершает рывок в какую-нибудь сторону (признак негоризонтальной платформы при старте) — тем не менее взлетает и летает нормально.
Спасибо, понял.
Визуально до 5. Поверхность — поле, луг, просёлочная дорога. Теперь буду внимательней следить за наклоном.
Вы меня не поняли.
При подаче питания инициализируются/калибруются акселерометры. А это ускорения в ту или иную сторону, поэтому при калибровке (сразу после включения) не трясти.
А наклоны (ровность поверхности) — за это отвечает гироскоп. Вы его ранее калибровали в МП (поставьте коптер так, поставьте его этак). И откалибровав один раз, далее калибровка не требуется, если не двигали полетный контроллер на раме.
Хотя микросхема и одна — функции разные и датчики тоже разные.
Поэтому повторю ещё раз — неровность поверхности при старте — роли не играет. И кроме дискомфорта при взлете никаких продлем не доставляет. А вот тряска при включении — оказывает влияние на акселерометр.
Я где-то так и понял. Но теперь всё максимально разжёвано и понятно.
Огромное спасибо!